Project Description
Project Description
Project Objectives
- Generate motion of an arm structure using Mckibben muscles
- Determine theoretical forces and moments about each muscle based on demo
- Write a brief report comparing theoretical and real life forces and moments
Supplies
These are the general supplies required to create the McKibben Muscles. For more specifics of cost and estimated amount needed, refer to the Bill of Materials section.McKibben Muscles
- Nylon braided sleeve
- Latex balloons (long)
Bone Structure
- Skeleton arm structure (true to size)
Equipment
- 3D printer
- Small bike tire pump
- Drill
- Scissors/Box cutter
- Lighter
- Syringes
- Zipties
- Scale
Software
- Desmos
- Blockpad
- Solidworks
- Cura
Instructor Prep
Prior to conducting this demo, instructors should have some familiarity with mckibben muscles and how they work to ensure that the in class portion of the demo works correctly. If they so wish, they should also familiarize themselves with Blockpad, but they need to know how to properly utilize Desmos’ graph functions. They should also fully conduct this demo beforehand so they have the values that the students will compare their own calculations with during the lab report portion of the demo.Phase Timeline
Phase 1: Introduction
- Introduce the McKibben Muscle
- Show how muscles move the arm
- Introduce the aspects of the assignment
- Intro to Blockpad *at instructors request*
Phase 2: Demo/Data Collection
- Demo the muscles with scale
- Have students collect needed data and assumptions
- Data
- Length of muscles
- Placement of muscles
- Arm geometry (given by instructor)
- Weight that arm is lifting
- Assumptions
- The muscle is static and not moving
- Object the arm is holding is a point mass
- The arm and humerus are beams with zero thickness
- Center of mass of the arm is located at exactly half of the forearm
- No tricep muscle
- The humerus is not going to move during motion
- Elbow is a pin joint and the origin of the problem
- Data
Phase 3: Student Calculations
- Calculate theoretical forces and moments on the bicep based on the demo
- Homework One
- Have the first set of theoretical calculations checked by instructor (do not disclose real life results)
- Check based on a tolerance level that only instructor knows
- Calculate theoretical forces and moments for all three muscles
Phase 4: Brief Lab Report
- Write a report comparing the theoretical calculation values with the real life values
Include possible error, room for improvement, and images of calculations
Extra Instruction (Setup, Data Collection, Desmos Instructions, Analysis)
Demo Setup:
For the demo, the instructor should set the arm on a pole structure that can balance on its own, as well as fastening a scale to the underside of a table or a table equivalent. They should then attach the arm to the pole structure, making sure that when the arm is actuated, it will press into the scale underneath the table. Finally, the instructor should attach the air pumps to the actuation point of each of the muscles, and the demo is ready to be conducted.
Collecting Data:
When the demo is conducted, the arm should be actuated to a set of typical angles, 90°, 135°, and 180°. The amount of force will then be measured by reading the force exerted on the scale. Either one or all muscles can be actuated at once. The data should be recorded for the different angles respectively.
Real Numbers:
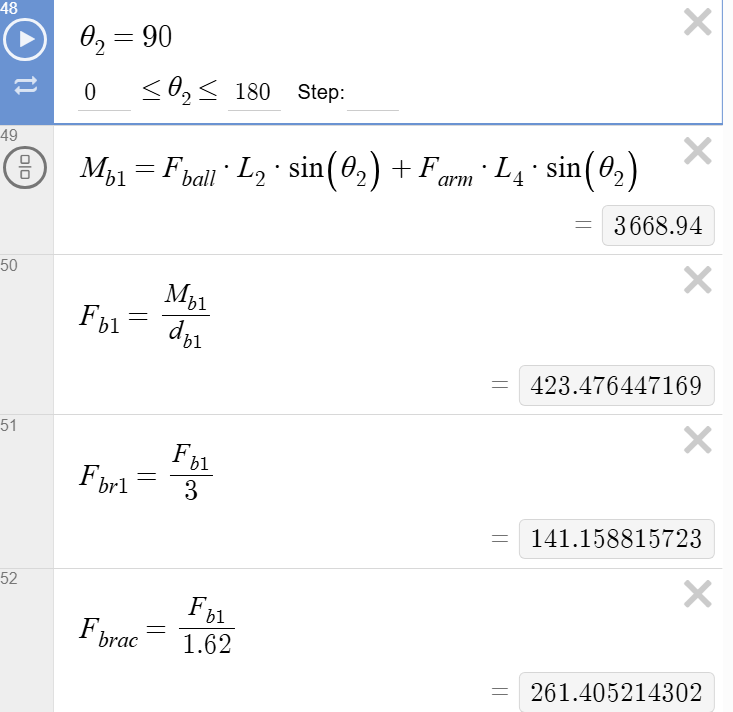
Below are theoretical calculations that the students should obtain using their Blockpad and Desmos simulation [1,2].
1. Single-Muscle Bicep Calculations
2. Link to Final Desmos Simulation for 3 Muscle Calculations
Example Picture of Desmos Simulation:
Data Analysis:
After completing their 1 muscle and 3 muscle calculations and simulation, the students will talk about their calculations compared to the values obtained from the demonstration. They should discuss potential errors and differences in data, and talk about their theory while conducting calculations. The students could then wrap up their analysis explaining what they learned from the lab to ensure the lab is achieving its educational objectives.
Note* The lab and the calculations have a permissible uncertainty of approximately ±10%-15%
References
[1] Tozeren, A. (2013a). 6.4 Moment Arm and Joint Angle. In Human Body Dynamics-Classical Mechanics and Human Movement (pp. 161–164). Essay.[2] Tozeren, A. (2013b). 6.5 Multiple Muscle Involvement in Flexion of the Elbow. In Human Body Dynamics-Classical Mechanics and Human Movement (pp. 164–165). essay.