Overview of Pneumatic Actuation
Overview of Pneumatic Actuation
Overview of Pneumatic Actuation
Basics
Pneumatic soft robots are a very common form of soft robot that uses air pressure to move and perform tasks. Just like how air pressure can cause a piston to move, air pressure is used in flexible structures to cause movement. This movement can be in a variety of forms, such as expansion, contraction, bending, and twisting. Below are a few examples of pneumatic soft robots.
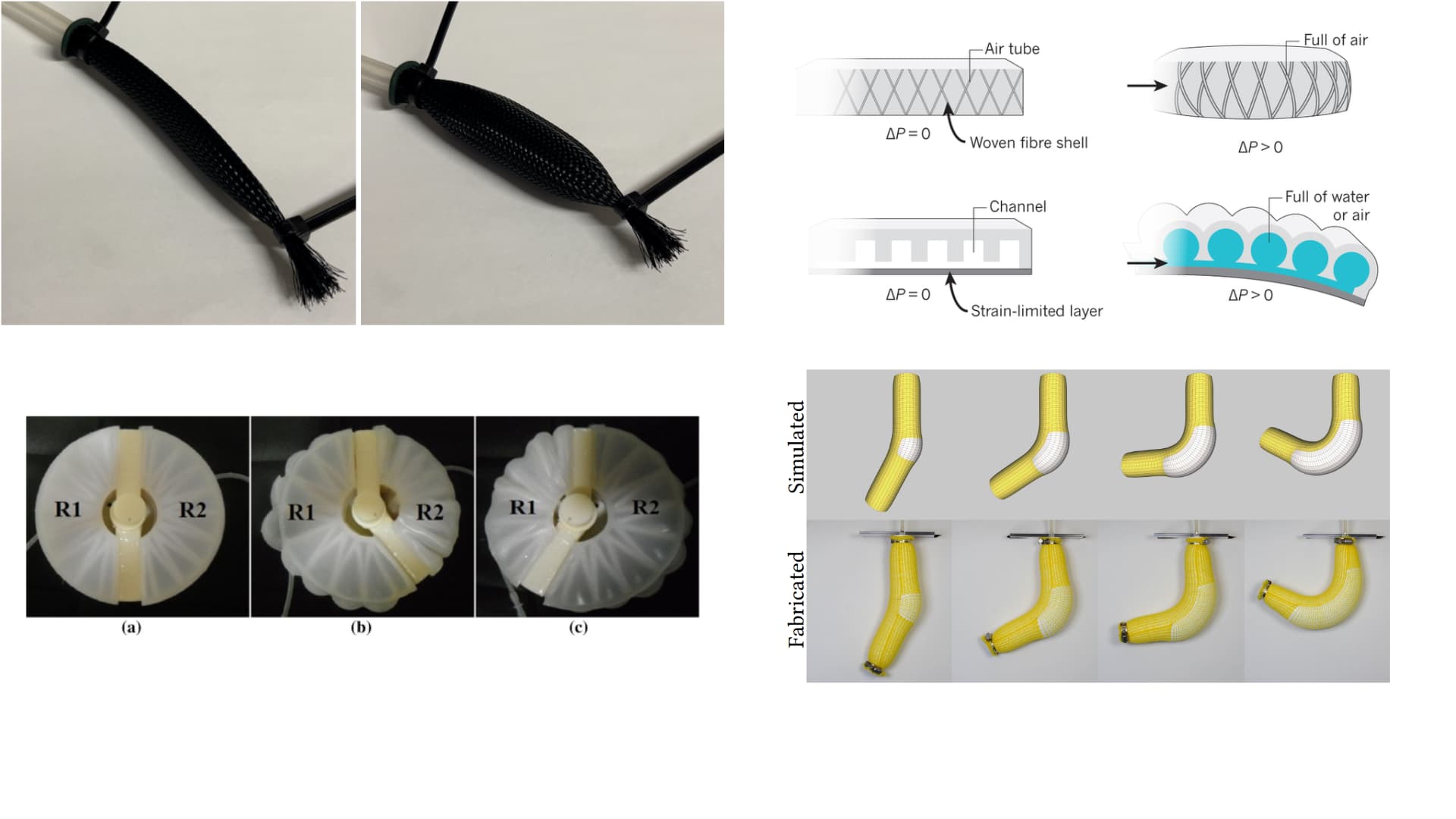
Top Left: McKibben Muscle, a pneumatic artificial muscle that contracts with air pressure. Top Right: two different forms of using soft materials and air pressure to create movement [1]. Bottom Left: rotary pneumatic actuator [2]. Bottom Right: pneumatic actuator that uses an expansive material constrained by fabric [3].
Properties
Pneumatic soft robots are readily used in the field due to their simple manufacturing, low complexity, and easy implementation. They also have fast response times and can be highly accurate, in addition to being lightweight. [4] However, due to their usage of compressible air they can have lower a force output than their hydraulic counterparts, and have more of a potential to deform under load.
Theory
Pneumatic soft robots can be analyzed using the equations for work done by a gas, which are the same equations used for pneumatic cylinders. Equation 1 below show the simple equation for calculating the work done by a soft pneumatic actuator, W, from a system with changing relative pressure PRel and volume V.
 (1)
(1)
The work can also be calculated by direct measurement of the total force displayed and displacement of the actuator. This is shown below in equation 2, and if the force is constant, the equation can be simplified as shown in equation 3. For these equations, F is the force and L is the distance covered.
 (2)
(2)
![]() (3)
(3)
Using equation 2, it is possible to rewrite this to solve for the force of an ideal actuator where the displacement is linear. This is shown in equation 4.
 (4)
(4)
Citations
[1] Rus, Daniela & Tolley, Michael. (2015). Design, fabrication and control of soft robots. Nature. 521. 467-75. 10.1038/nature14543.
[2] Oguntosin, V., Abdulkareem, A. Hand gesture control and design of a rotary pneumatic soft actuator using leap motion sensor. Int J Intell Robot Appl 4, 328–341 (2020). https://doi.org/10.1007/s41315-020-00140-5
[3] Albaugh, Lea & Hudson, Scott & Yao, Lining. (2019). Digital Fabrication of Soft Actuated Objects by Machine Knitting. CHI EA '19: Extended Abstracts of the 2019 CHI Conference on Human Factors in Computing Systems. 1-4. 10.1145/3290607.3313270.
[4] M. S. Xavier et al., "Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications," in IEEE Access, vol. 10, pp. 59442-59485, 2022, doi: 10.1109/ACCESS.2022.3179589