McKibben Creature

McKibben Creature
Overview
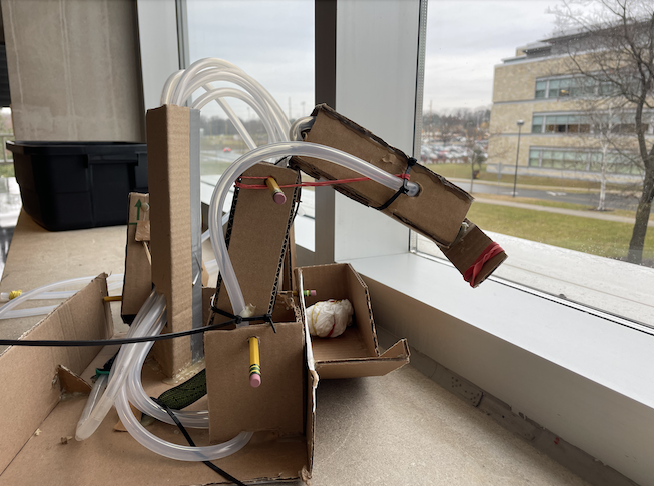
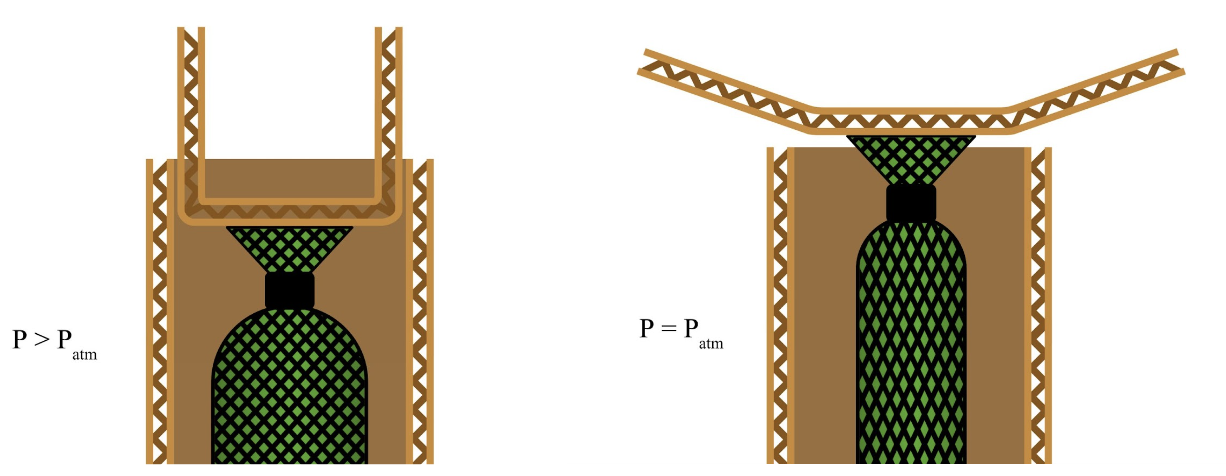
The McKibben Creature is a low-cost robot that is solely actuated by McKibben muscles. Materials such as corrugated cardboard and other readily available materials can be used for construction. All robots must address 3 challenges: locomotion, collection, and storage. Students will be working in teams of 3-4 to design and produce these robots. At the end of the project, students will compete in a simulated environment to collect small “food” tokens. Tokens can be placed at varying elevation levels with differing values of points.
This report has been written into a peer-reviewed conference paper. For further details into the curricular context of this particular project, please refer to the paper [1].
Course Implementation
Potential Course(s) Implemented:
- First-year Engineering course
- Sophomore-year Engineering course
- Highschool STEM related courses
Pre-requisite courses/topics needed: N/A
Expected Timeline: 8-11 Weeks
Learning Outcomes:
- Applying knowledge of mechanical forces and torque
- Practice approaching design challenges parametrically
- Optimize a product design given constraints
- Design a soft robotic system to accomplish a task
- Evaluating competitors and stategizing design

Contributors
Joseph Midiri / Kathy Trieu / Douglas Snyder
References
[1] Midiri, J. R., & Trieu, K., & Xue, W., & Trkov, M., & Jamison, C. S. E., & Bakrania, S. (2024, June), BYOE: McKibben Creature - A Low-Cost Robotic Simulation of A Biological Environment Paper presented at 2024 ASEE Annual Conference & Exposition, Portland, Oregon. 10.18260/1-2--48435
[2] “What Is a Pneumatic Actuator and How Do They Work?” Process Industry Forum, www.processindustryforum.com/article/what-is-a-pneumatic-actuator. Accessed 15 Mar. 2024.
[3] R. H. Gaylord, “Fluid actuated motor system and stroking device,” 2844126, Jul. 22, 1958 [Online]. Available: https://patents.google.com/patent/US2844126A/en