Pneumatic
Pneumatic
Pneumatic Actuation
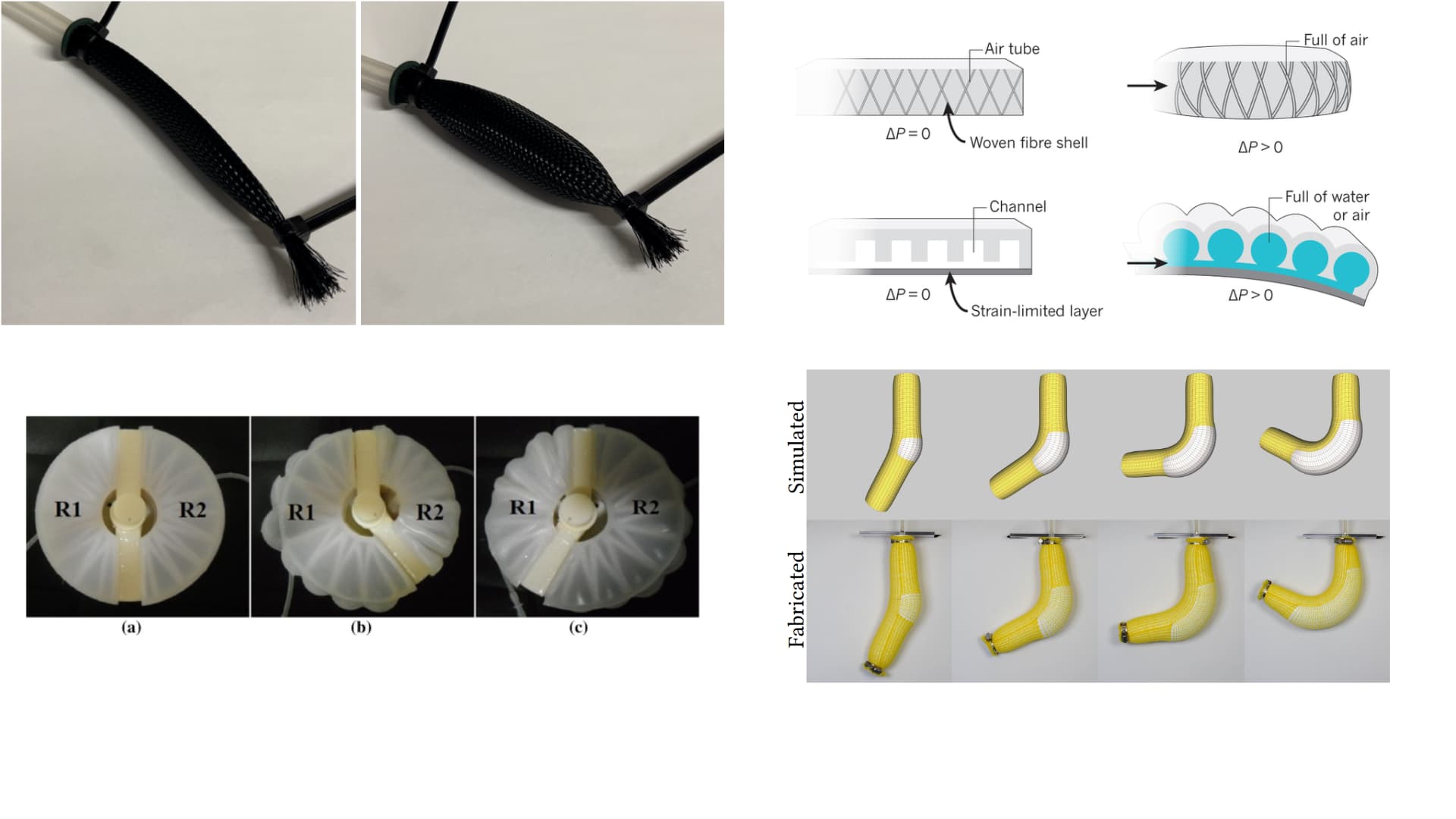
Pneumatic actuation uses controlled air pressure to create motion in soft materials. By increasing or decreasing air pressure inside flexible chambers, soft robotic structures can bend, contract, expand, or stiffen.
Unlike rigid motors and linkages, pneumatic systems allow safe, compliant movement that mimics biological muscle behavior.
Types of Pneumatics
Positive Pressure - Inflation
Air is pumped into a chamber, causing expansion or bending.
Negative Pressure - Vacuum
Air is removed from a chamber, allowing atmospheric pressure to compress the structure inward.
Theory
Understand more about the concepts of pneumatic actuation in soft robots.
Educational Projects
The projects below demonstrate pneumatic systems in education.
McKibben Creature
The McKibben Creature is a low-cost robot that is solely actuated by McKibben muscles. Materials such as corrugated cardboard and other readily available materials can be used for construction.

Machine Design Fish
Develop a soft robotic fish toy for integration into a machine design curriculum. Students will be tasked with designing a mechanism to enable the actuation of a silicone fish tail.
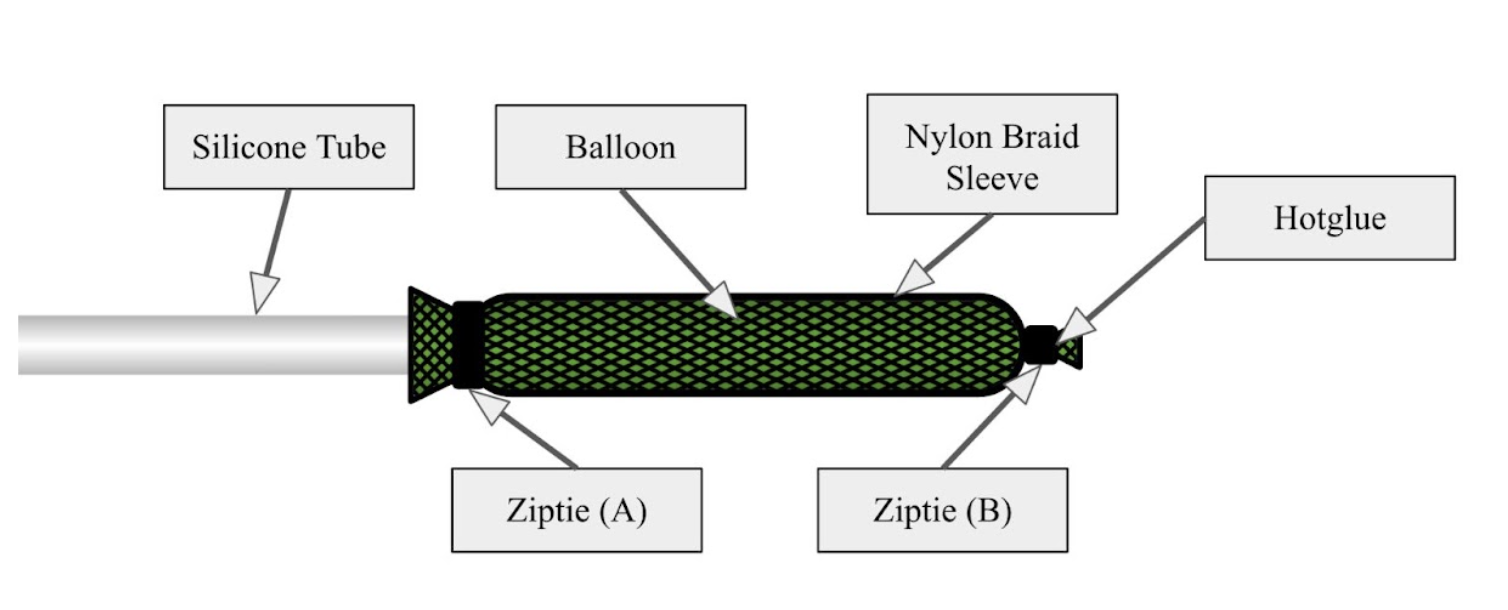
McKibben Muscle
A class sample of McKibben Muscles will each be tested for different criteria (ex: length, inflation diameter). Each student will perform statistical analysis using the data.
Outreach
Rubber Duck Boat
The rubber duck boat is a fun 2 hour activity for students ranging from upper middleschool to highschool. Students will work in teams of 4-5 to create a paddle boat powered by McKibben muscles.