Overview

Overview
Overview
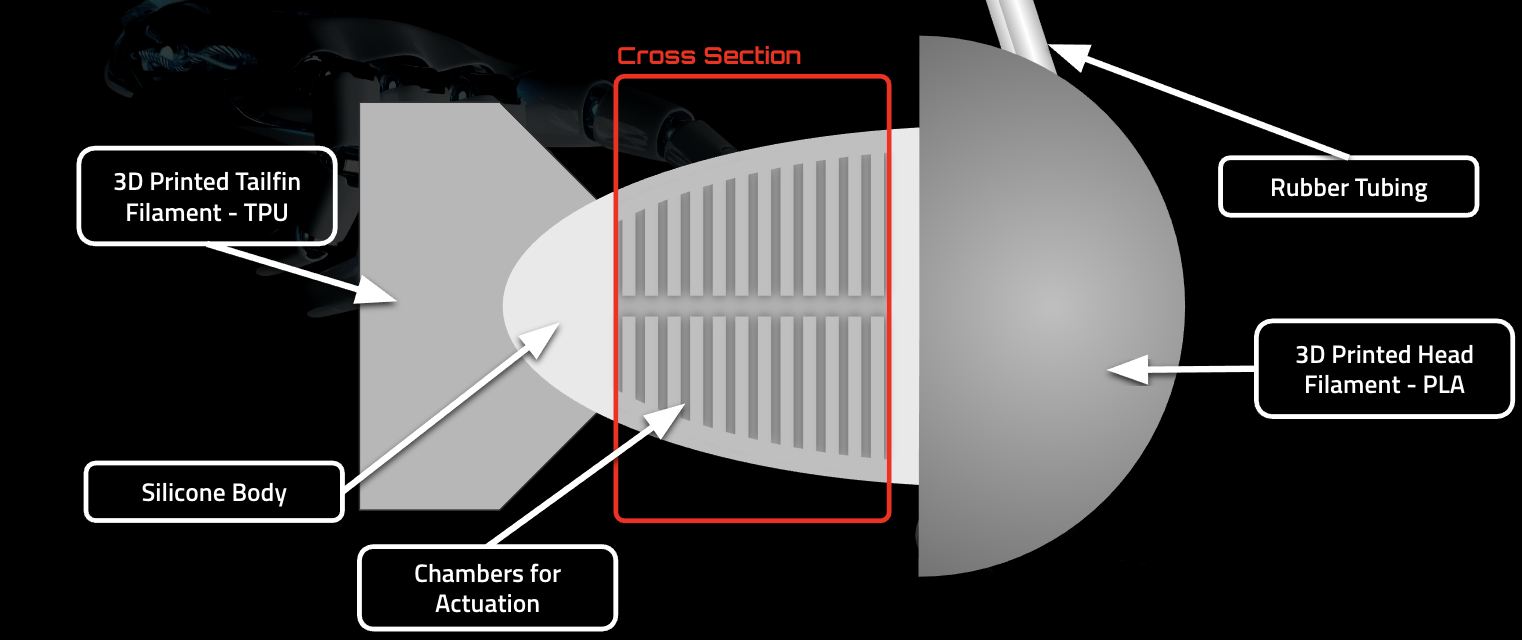
The Hydraulic Fish Toy introduces a collaborative collegiate project aimed at crafting a streamlined soft robotic fish with the ultimate objective of fashioning an interactive toy for kids. The endeavor entails utilizing 3D-printed parts and molded silicone to construct a fish propelled by hydraulic mechanisms. Students will work individually to design and produce their fish toys.
This report has been written into a peer-reviewed Conference paper. For further details into the project, please refer to this paper [1]
Course Implementation
Potential Courses Implemented:
- Sophomore-year Engineering course
- Soft Robotics course
Fundemental Engineering Concepts: Fluid mechanics
Pre-requisite courses/topics needed: Statics
Expected Timeline: 6-8 Weeks
Learning Outcomes:
- Demonstrate understanding of design principle by producing a functional 3D printed mold
- Fabricate a hydraulic actuation system using soft components and assembly
- Utilize hydraulic actuation to propel a soft robotic fish
- Create a design that implements entrepreneurial practices to meet an audience’s needs
- Apply parametric design and engineering troubleshooting
- Design and iterate on prototypes using CAD and 3D printing of molds
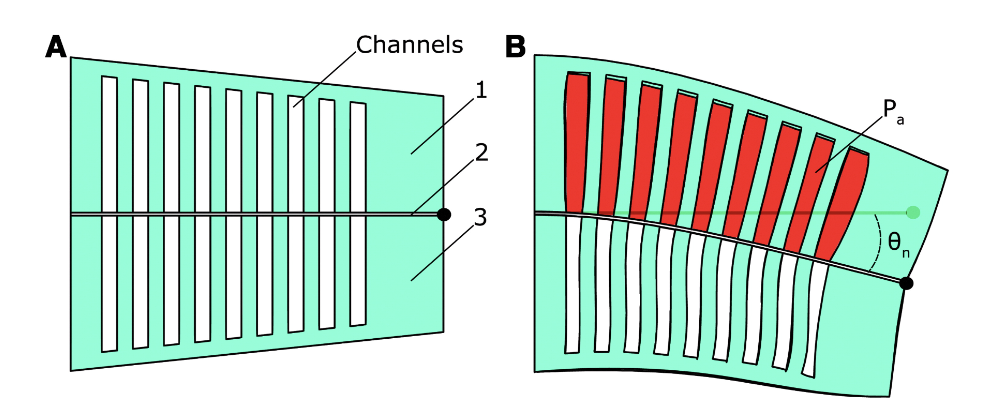
Soft Robotic Actuation Principle
Many robotics projects include a single actuation principle using electric motors, however, the proposed robotic fish project can make its own motion using both hydraulic and pneumatic actuation, which allows students to experiment with two different unique principles.
Theory Application
Understand the acutation principle and underlying engineering theory applies to this project
Prototype Description
See the breakdown of how this project will be implemented in a course including instructor prep, materials, and phase timeline.
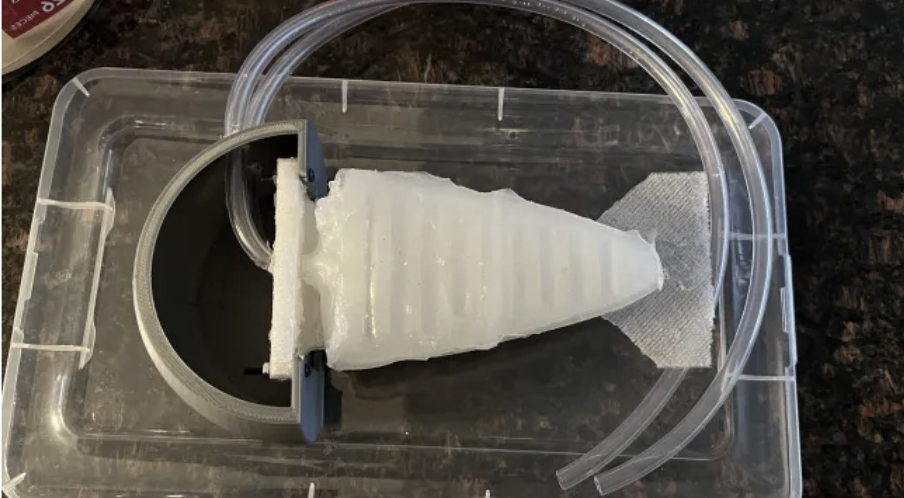
Sample Prototype
See how the developers fabricated the prototype of this project.
Contributors
Matt Longstreth / Vincent Sambucci / Alex Siniscalco