Sample Prototype
Sample Prototype
Sample Prototype
The purpose of this prototype is for students to use ours as an example but student should implement their own ideas and designs to their own prototype.Overall Design
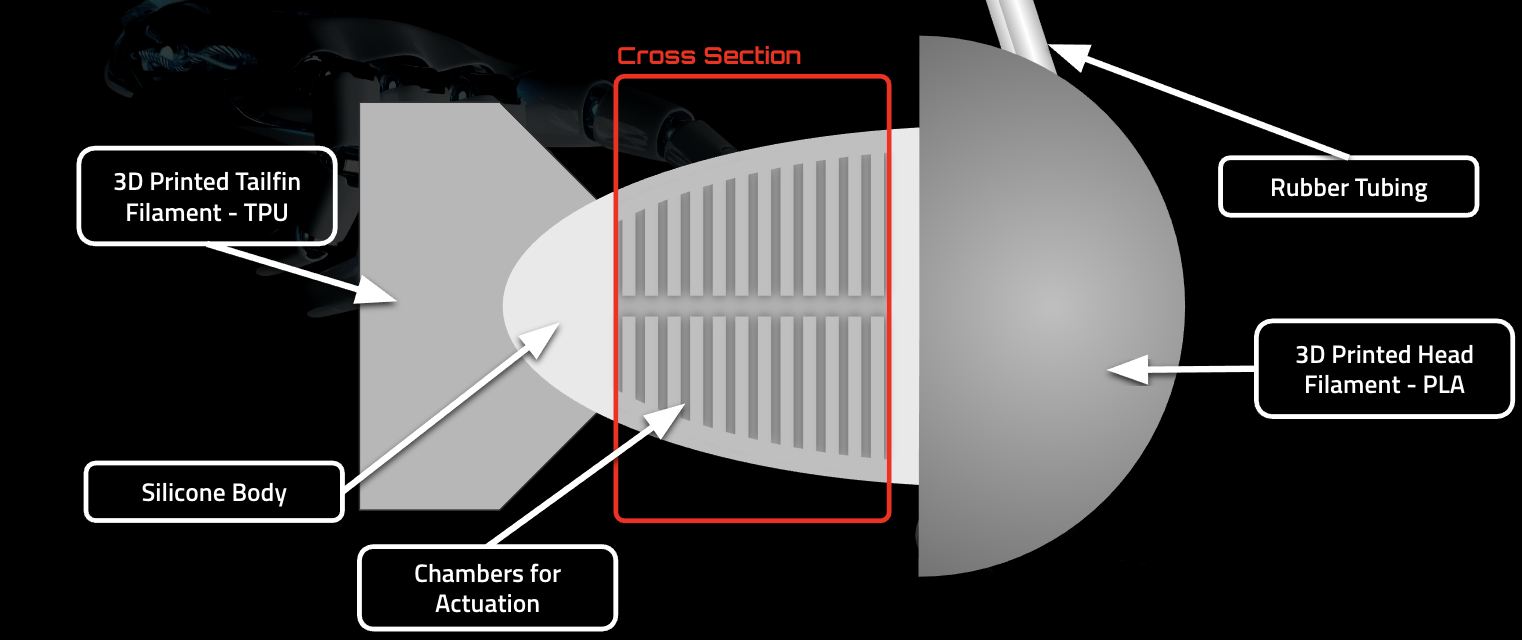
The image provided is a graphic of the overall design. The entirety of the fish will be made of silicone rubber and 3D printed parts using both rigid PLA and compliant TPU filaments. Both air channels are connected to rubber tubing that run outside the fish and connect to plastic syringes. These syringes, as you can see, are simply manually actuated to create motion in the tail. By increasing the air pressure on one side of the fish, the silicone will expand on that side causing the other side to compress. By doing this alternatively, the will produce a continual swimming motion.
Fish Body
3D Printed Mold
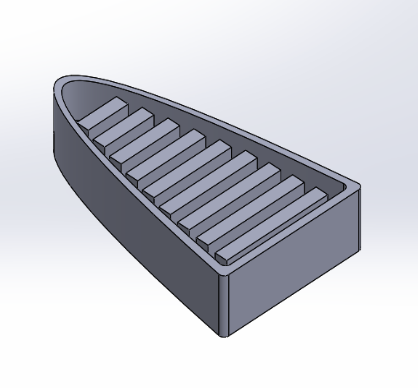
The body is made out of silicone with two internal air chambers running along both sides of the fish which produces the flexing motion of the fish.
Silicone Body

After the curing process, the silcone body can be removed from the mold. A small hole is made through all the channel ways to allow air to flow through. A flat piece of silicone rubber that fits the shape of the body is adhered to the open side of the body along the edges. The tubing is attached to the front and used to actuate the body. 2 of these parts are produced to create the whole body.
Spine and Head Components
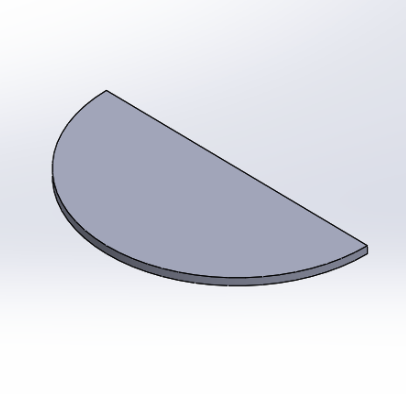
Spine
The spine componenent is printed out of flexible TPU filament and is placed in between the two sides of the silicone body. This spine gives the body rigidity while also ensuring the silicone channels expand on the external side of the part rather than internally.
Fish Head
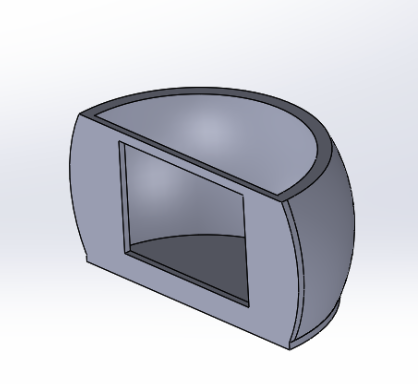
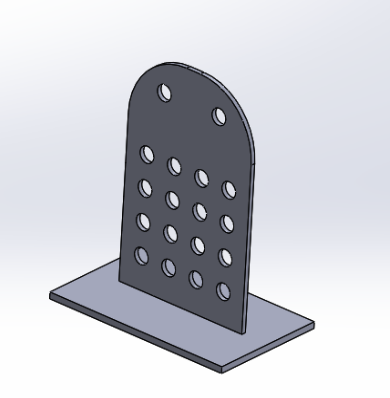
The fish head is made up of 2 parts: the head and the plate. The hole on the side of the head allows for accessibilltiy into the inside to attach and fasted the silicone body to the head. The flat side of the head is the side that attaches to the silicone body. Once fastened, the plate cover can be screwed in to cover the internals.
Final Prototype
This image presents the final assembly of the fish design with the cover plate removed to demonstrate the internals. This image provides a better demonstration of how the silicone body is fastened to the head and how the silicone tubes run out of the body through the head.
Summary and Conclusion
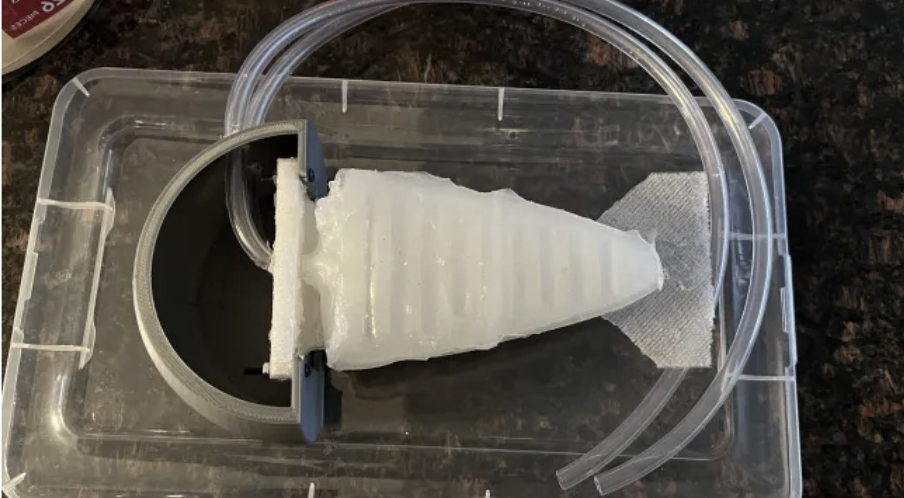
Two different environments were utilized to test the fish including a tub filled with water and a pond. In the small tub, a pencil was drilled through the head of the fish to provide only movement to the body and tail while keeping the entire fish stationary. Once the stationary actuation was tested, the fish was placed into the pond to test its movement. The pencil also acted as a balancing agent using styrofoam squares. Long tubes and syringes caused the actuation of the fish by pumping water in and out of the body letting the fish swim with forward movement in the pond, ultimately proving that hydraulic actuation could make the fish toy function.
