Course Implementation

Course Implementation
Hydraulic Actuation
Hydraulic actuation is the way of using water to produce motion. Given water's incompressibility, the fluid can inact a considerable amount of force in machines and systems. Additionally, this key property also allows for precise and controlled movements. In the case of the hydraulic fish toy project, water is used to created pressure in silicone channels made within the fish body. When the water is added to one side of the body, the channels will expand and while the other side of the fish decompresses, the fish body will curl towards the side of decompression. By oscillating this pattern, the fish will sway in a fish-like motion. An image of internal channels and their deflection can be seen in the image below as well as the resulting fish motion.
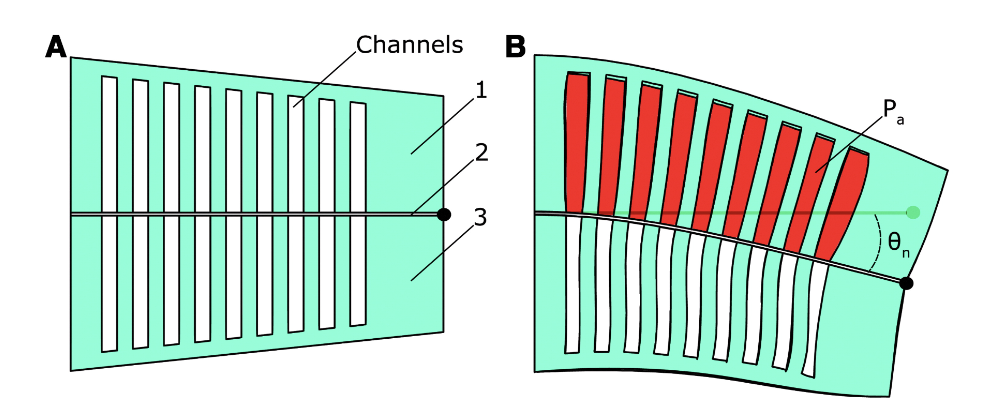
Diagram of internal channels before and after hydraulically pressurized [1]
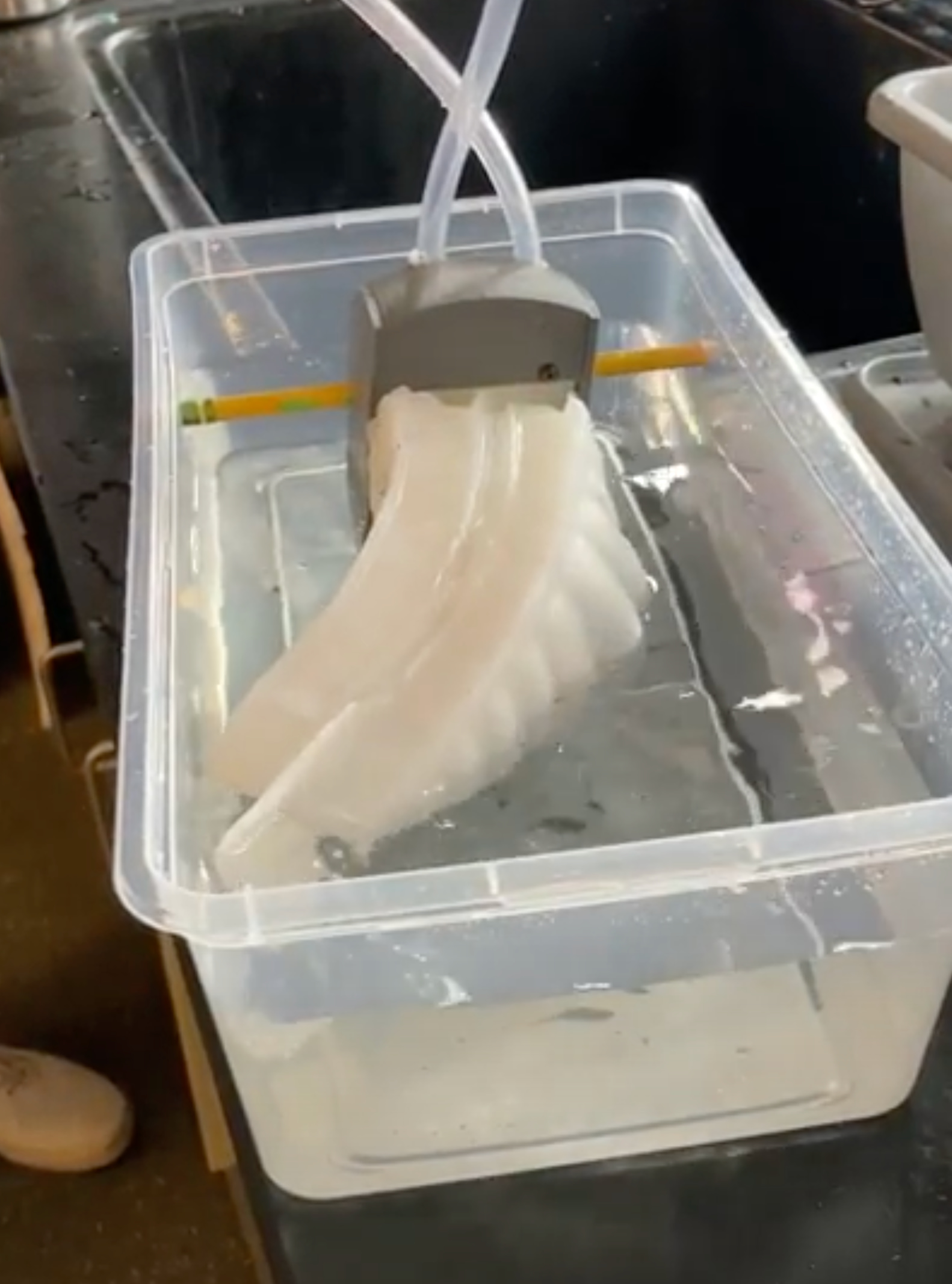
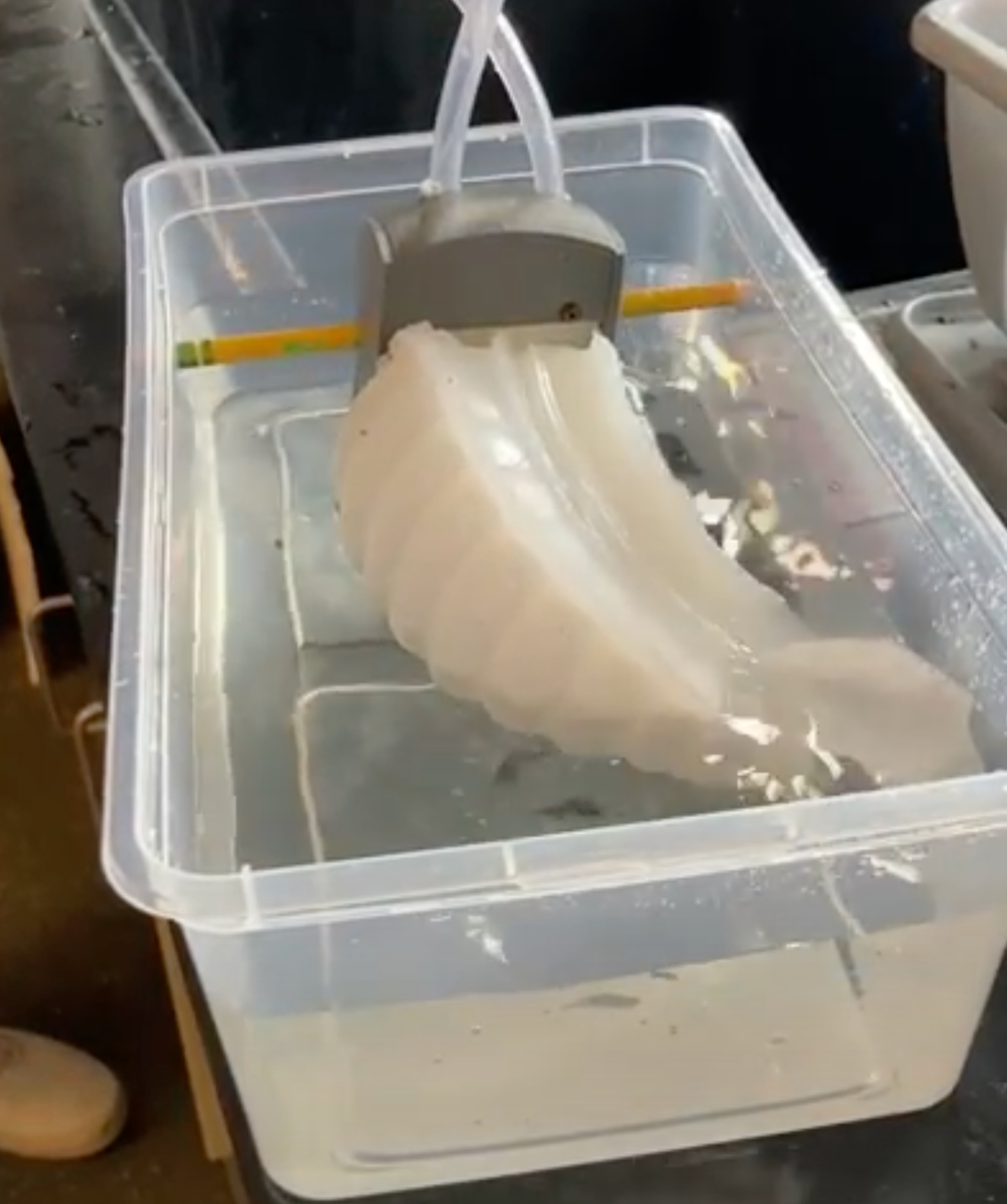
Image of final Hydraulic Fish toy prototype actuating in a tub of water
References
[1] Modeling and control. (n.d.). Modeling and Control – Soft Robotics Lab | ETH Zurich. https://srl.ethz.ch/research/modeling-control.html