Theory Application

Theory Application
Soft Robotic Actuation Principle
Pneumatic Actuation:
Pneumatic actuators are devices that use the energy in the form of a fluid (typically compressed air) to create mechanical motion [2]. The most commonly consist of pistons, cylinders and valves. A widely used pneumatic actuator is the McKibben muscle, patented by Gaylord, Richard H. [3]. The muscle simply contracts due to an increase in pressure causing a linear contraction.
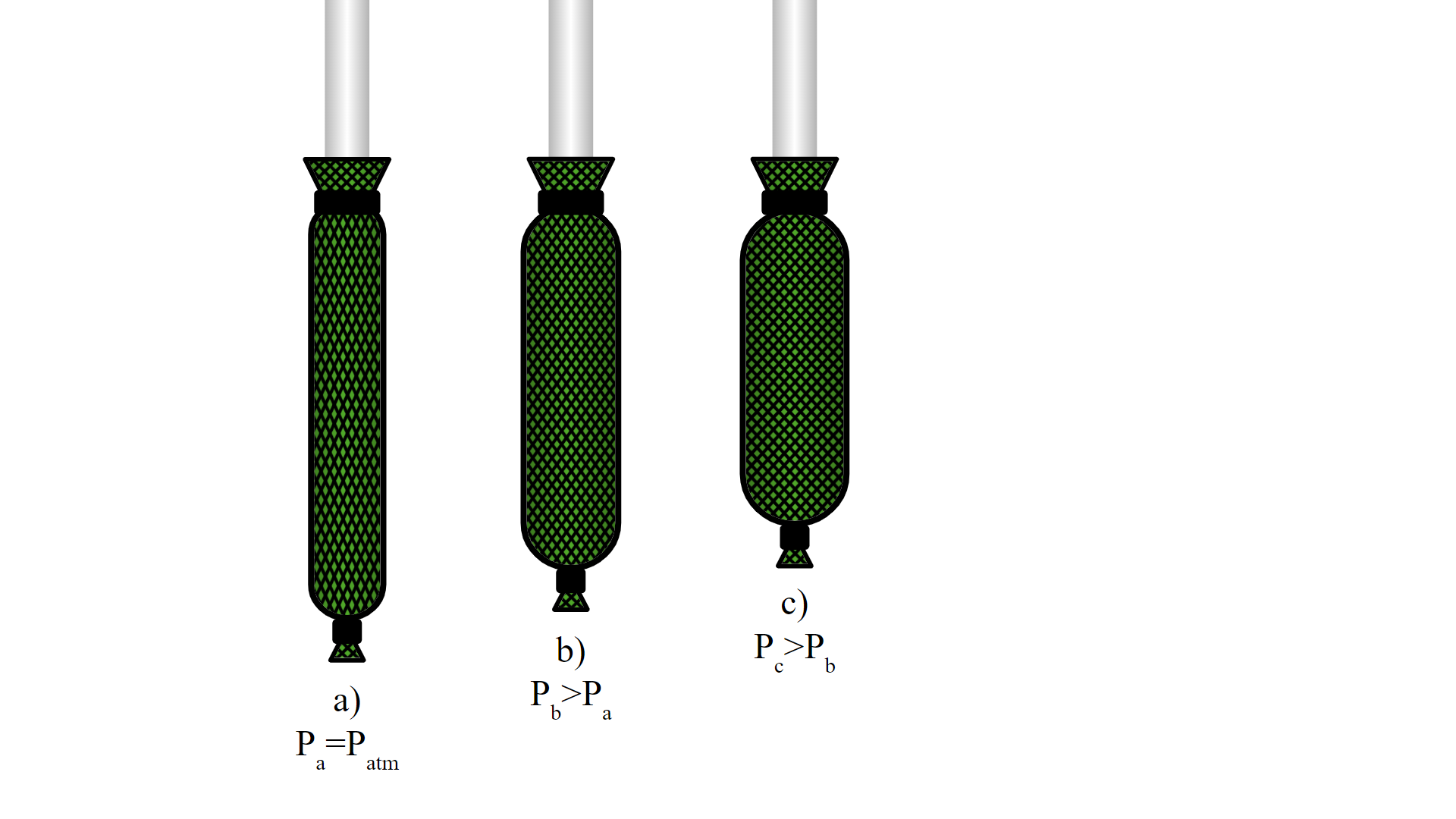
Figure has been copied [3]
Diagram of how the McKibben muscles contract linearly in relation to increase of internal pressure in stages (a) - (c). Relative pressure is noted at each stage of the illustration.
Additional Concepts
Explanation of concept(s)/underlying theory:
Balancing Equations:
In order to simplify the creature design and lighten the weight, locomotion with a single muscle would be greatly preferred. However, there’s an issue that arises with this. How do we take simple, one dimensional motion to something that can move a creature forward? The answer comes with the forces involved. If a muscle can put more force going one direction than the other, then we can use simple motion to move the creature. There are many ways of accomplishing this, but a simple and reliable method is shown below.
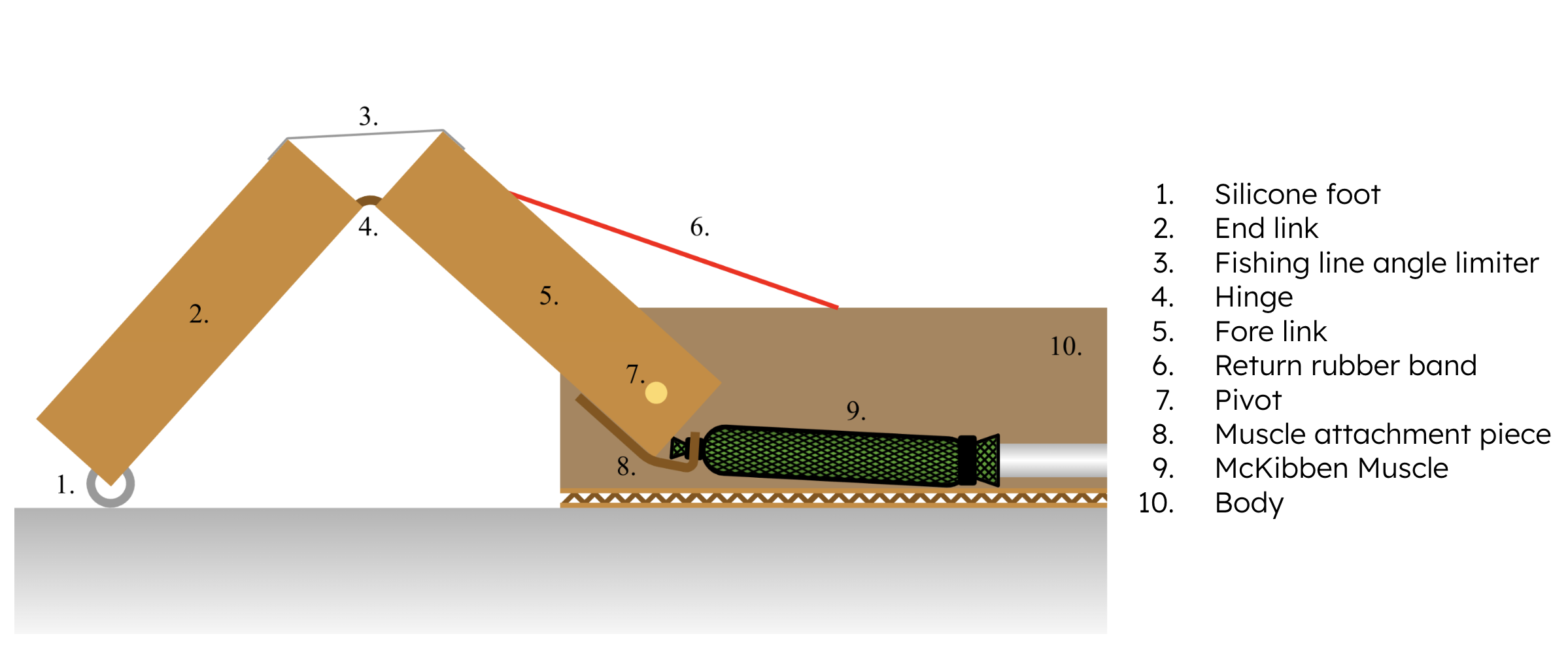
Diagram of physical components of McKibben creature leg.
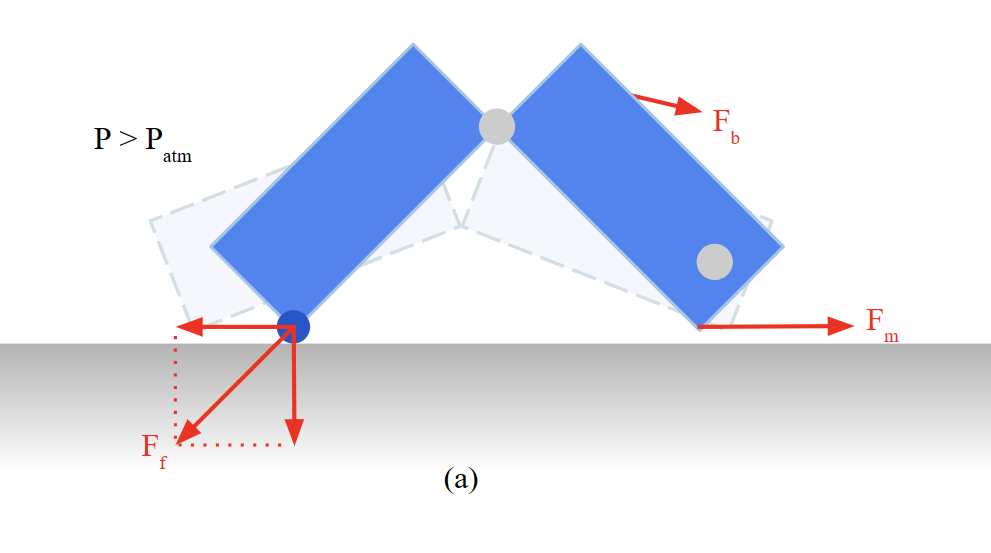
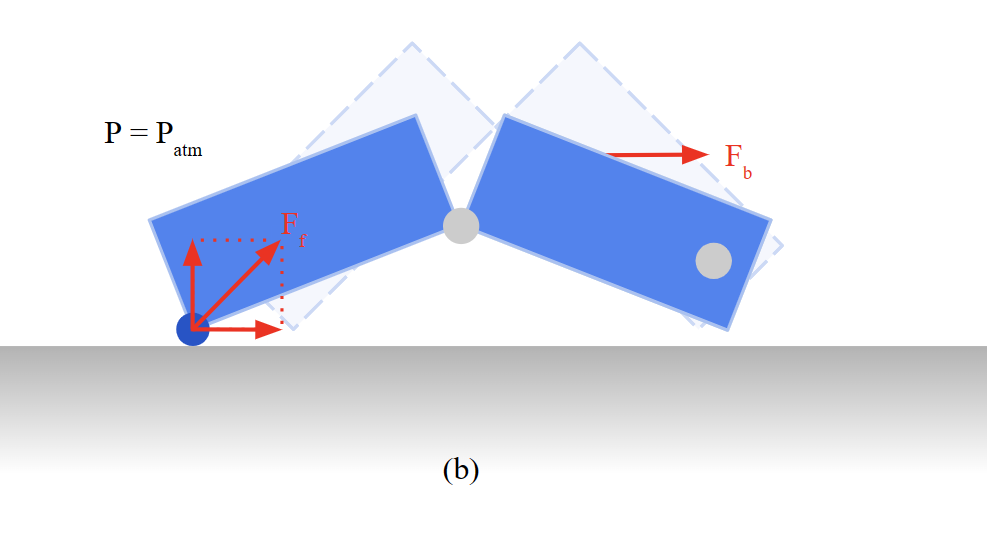
Diagram of forces involved in leg operation. The gray dots are representative of pivot points.
This basic leg mechanism operated through relatively simple principles. The force of the muscle and the force of the return rubber band each provide a torque on the leg, which as a result produces a force on the foot. The force from the foot is backwards and downwards when the muscle is actuated, causing the foot to increase grip and push the creature forward. When the muscle is released, the force on the foot is upwards and forward, causing the leg to lose grip and slip forward. This combined motion propels the creature successfully. To analyze the forces, the basic torque equation can be used.
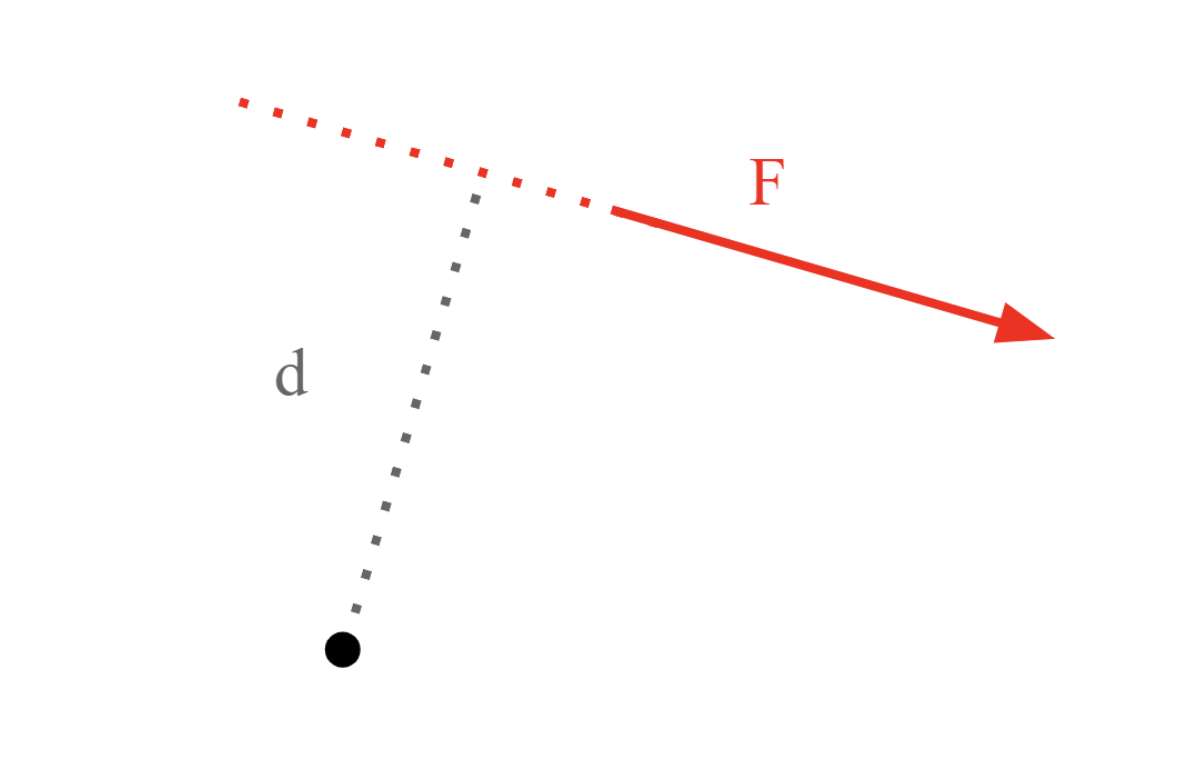
T=F*d
For this equation, d is the distance at which the force acts at from the center pivot. This is not the distance at from the point of application, as shown in the figure below.
When the foot is stationary, the leg can be analyzed by the following equation. This equation is a combination of the general torque equation, accounting for all three forces on the leg.
T=Ffdf+Fbdb+Fmdm
References
[1]“What are Pneumatic Actuators,” Measurement Products. https://new.abb.com/products/measurement-products/measurement-products-blog/what-are-pneumatic-actuators
[2] R. H. Gaylord, “Fluid actuated motor system and stroking device,” 2844126, Jul. 22, 1958 [Online]. Available: https://patents.google.com/patent/US2844126A/en
[3] J. Midiri and K. Trieu, “BYOE: McKibben Creature: A Low-Cost Robotic Simulation of a Biological Environment,” in Experimentation and Laboratory-Oriented Studies Division (DELOS) of the 2024 ASEE Annual Conference & Exposition, ASEE 2024, Portland, OR, USA, June 23-26, 2024 [Online]