Sample Prototype
Sample Prototype
Sample Prototype
The purpose of the prototype McKibben creature is to show the feasibility of the concept and the developers design approach. Although parts included on it can be used in other McKibben creatures, it is not intended to be directly copied. Key sections such as the leg mechanism and air muscles can, however, be directly shown to students in order expedite the development process only if needed.Locomotion
Design
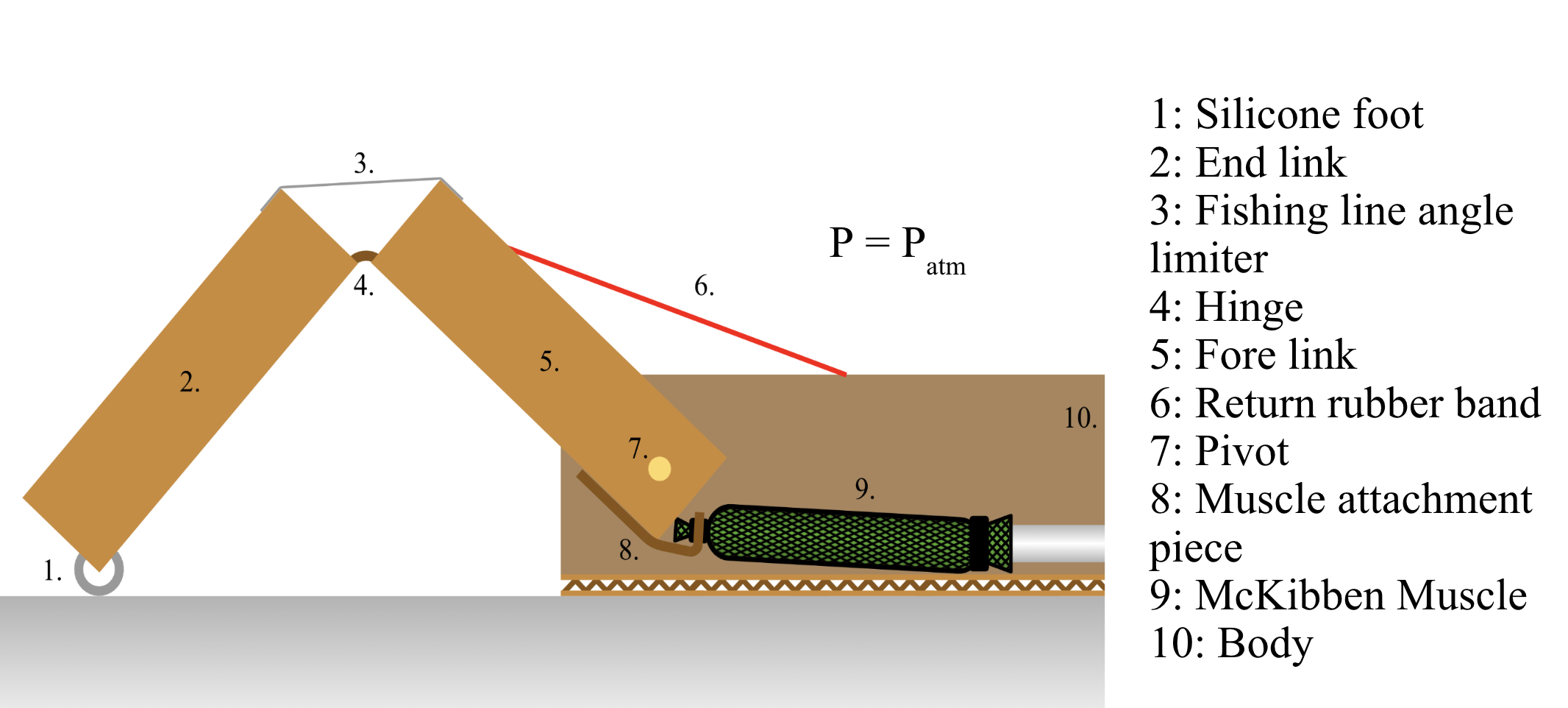
In the design approach for locomotion, the mechanism that demonstrated most success was one that imitated an inch-worm like motion. One leg consists of 2 rigid links attached to a single McKibben muscle along with 1 section of silicone tubing and a single plastic syringe. The diagram presents the design with labeled parts.
Iteration #1

This single legged prototype is first iteration done that was able to accomplish locomotion.
Iteration #2

In order to produce multi-directional movement, the single leg was duplicated.
Collection Mechanism
Arm Design
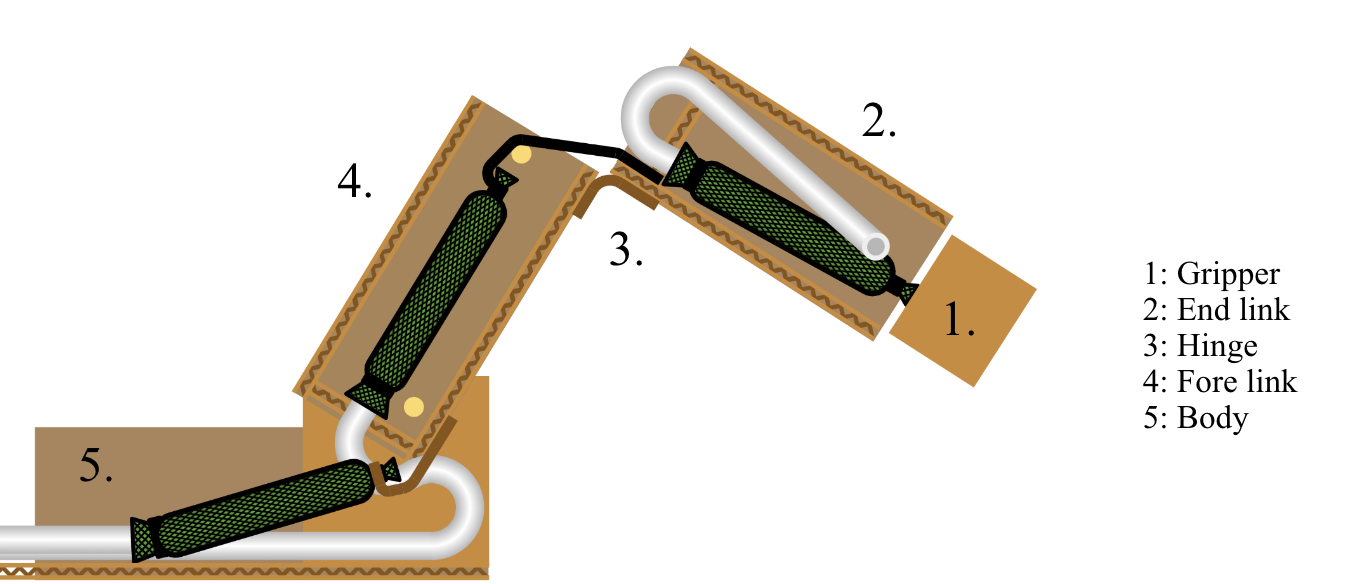
For the collection mechanism, a 3 McKibben muscle simple arm was constructed. It consisted of two links and a gripper on the end of the arm. The muscle for the gripper was located in the end link, the muscle for controlling the bend of the links was located in the base link, and the muscle for controlling the angle of the whole arm was attached directly to the base of the McKibben creature. This configuration of the arm can be seen in the first diagram.
The return force was provided for the end link by a few rubber bands, while the return force for the base muscle was the silicone tubes themselves. These were routed in such a configuration that the bending of the arm caused the silicone tubes to bend, creating a reciprocal force. This both accounted for the forces in the tubes that resulted from the movement of the arm and negated the need for return bands. The arm mechanism is oriented 90 degrees from the forward direction of the robot because of its inability to reverse. After the robot grabs food tokens from the side, the robot can then navigate away.
Gripper Design
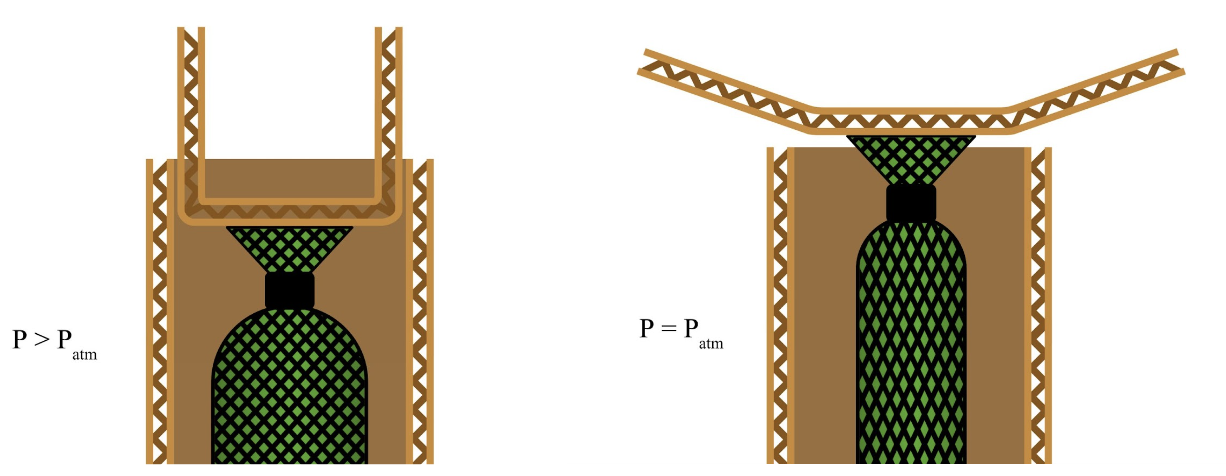
The gripper was the simplest mechanism that could possibly be developed. The end of the gripper muscle was directly connected to a piece of cardboard folded into three sections, as can be seen in the diagram below. When the food item is positioned directly in front of this piece, the user would then actuate the muscle. This would cause the piece to be pulled into the linkage, creating a C-shape that would grip onto the food token. The diagram of the gripper mechanism in its closed and open positions can be seen in the diagram.
Iteration
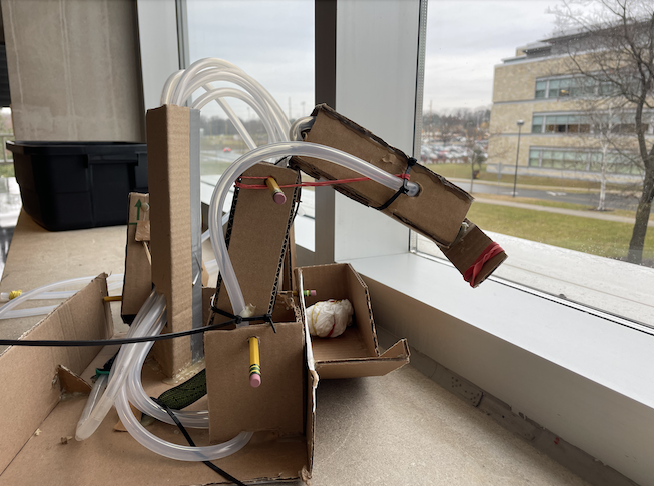
The image shows the final collection mechanism attached onto the locomotive iteration. The arm is oriented at a 90 degree angle relative to the forward direction of the robot. Because the robot has no reversible capabilities, if if the arm were facing the same direction with the arm at the front of the robot, it has the potential to be stuck and unable to turn away. Placing the arm on the side allows the robot to approach an object and be able to move away once grabbed.
Storage and Improvements
Storage
Due to the limitations of the collection mechanisms range, the storage component had to be added rather than utilizing the existing body. Although, this was done so easily by attaching the component just underneath the arm. The storage component has a ramp to allow the food tokens to roll down and ensure those tokens do not hinder new tokens. A column that collects all the silicone tubing sits in the middle of the prototype to ensure the tubes do not hinger the robots movements.

Final Prototype
Summary and Conclusions
The prototype’s performance demonstrated high maneuverability both in motion and in the arm mechanism. The robot has the ability to make sharp turns as well and grab items with precision. However, the robot’s relative speed is slow due to the minimal force provided by the legs in comparison to the overall weight of the robot.
