Sample Prototype
Sample Prototype
Sample Prototype
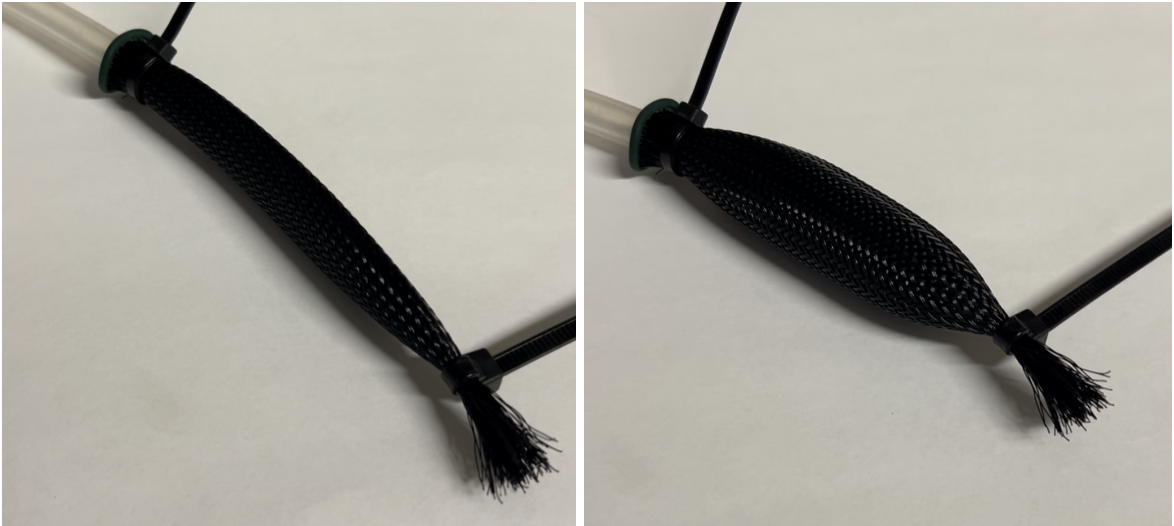
The purpose of making this prototype is for students to get exposed to soft robotic actuation. The McKibben Muscle is a simple pneumatic actuator. Students are tasked with the recreation of the prototype. They will each be collecting data about the muscle they made and sharing that data with the rest of the class to perform analysis of their own muscle using the class data.McKibben Muscle
The McKibben muscle produced was made in effort to use low-cost and readily availible materials to make it inexpensive for teachers. Teacher will need to provide the materials to students to ensure consistency in supplies to support the data collected. The muscle is relatively simple to reproduce for students and does not require any advanced equipment. However, there was notice of leakages around the seal generated by the ziptie at the end after extensive resulting with the muscle failing.