Theory Application
Theory Application
Soft Robotic Actuation Principle
Pneumatic Actuation:
Pneumatic actuators are devices that use the energy in the form of a fluid (typically compressed air) to create mechanical motion [1]. The most commonly consist of pistons, cylinders and valves. A widely used pneumatic actuator is the McKibben muscle, patented by Gaylord, Richard H. [2].The muscle simply contracts due to an increase in pressure causing a linear contraction. A diagram of the muscle's contraction process can be seen in the diagram.
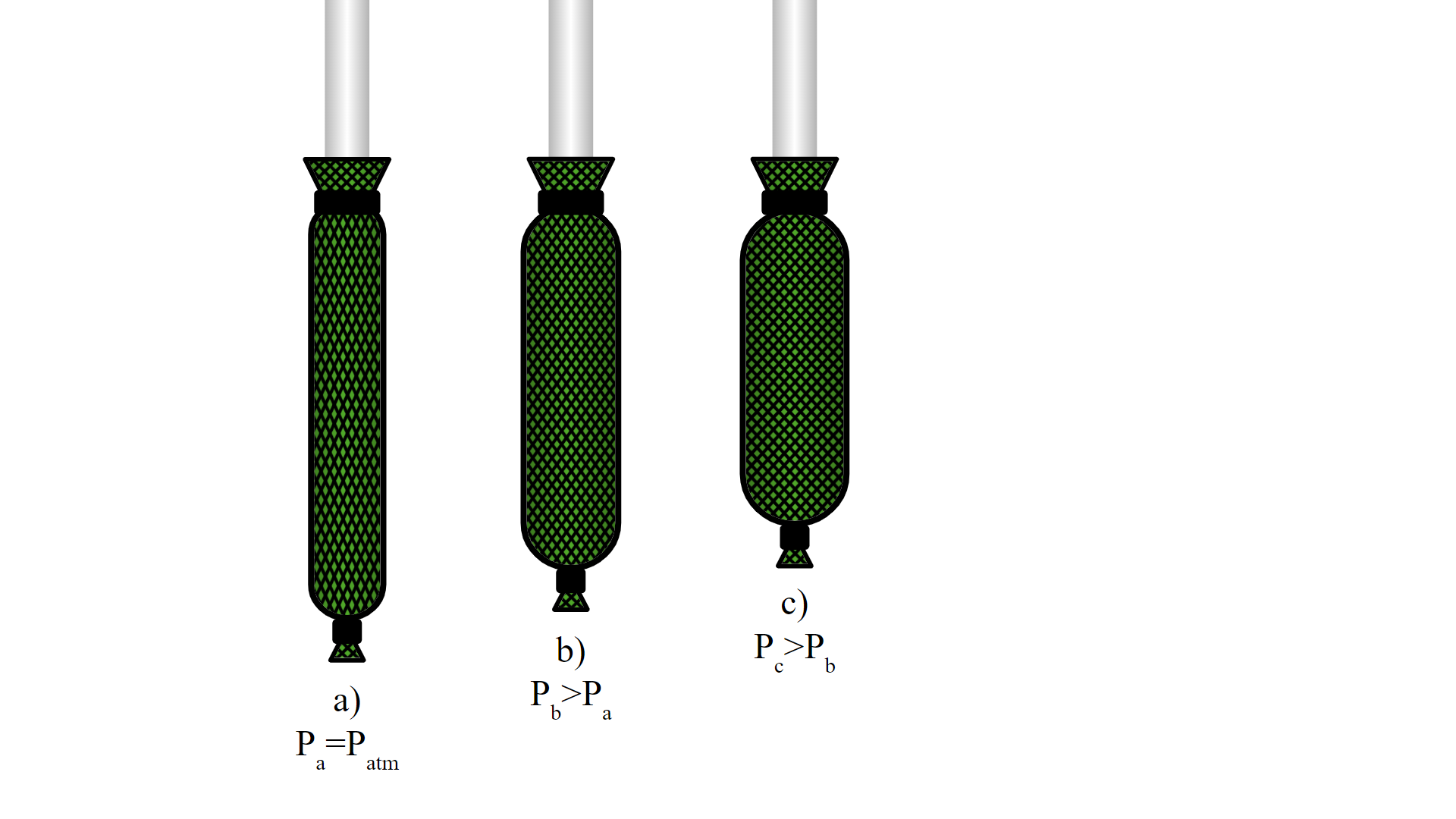
Figure has been copied [3]
Diagram of how the McKibben muscles contract linearly in relation to increase of internal pressure in stages (a) - (c). Relative pressure is noted at each stage of the illustration.
Theory Application
Paddle Operation
The paddle is designed to swing back and forth using the McKibben muscle. In order to provide forward thrust, the paddle must provide more thrust in the back stroke than the fore stroke. It does this by being able to fold between certain angles. During the backstroke, the foam paddle sits flat against the acrylic piece of the wire paddle mount, providing forward thrust. During the fore stroke, the paddle sits up against the paddle angle limiter, allowing it to slip easily through the water with little force applied on the boat. This cycle is continuously repeated to make the boat go forward.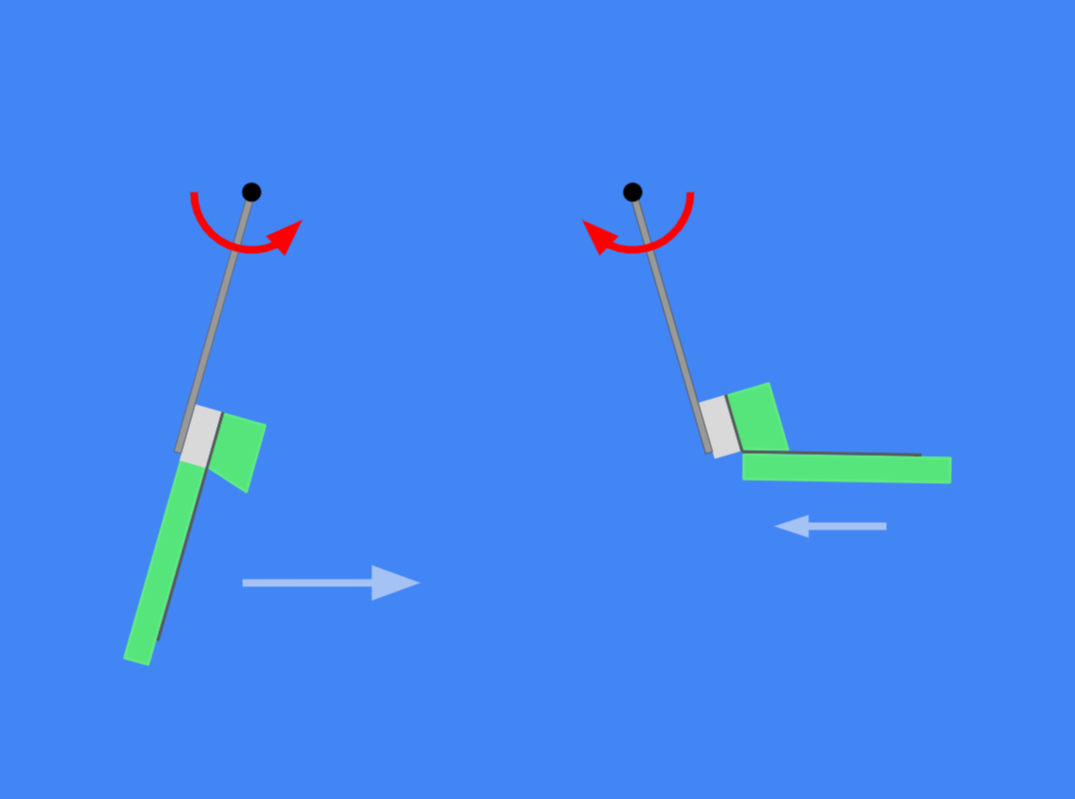
Paddle Torque
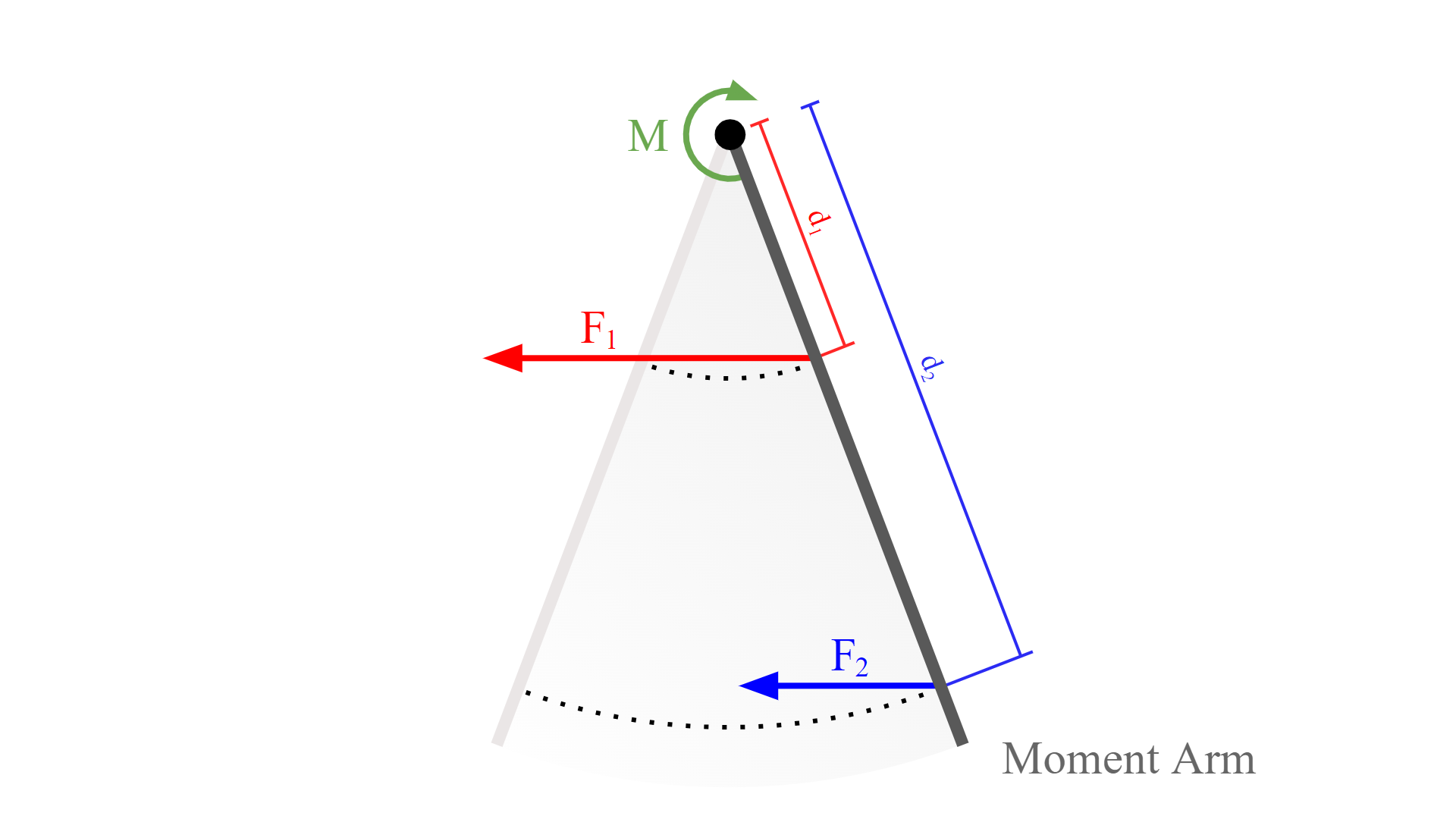
As air pressure is applied the McKibben muscle contracts. The muscle is connected to a small moment arm, allowing for a high degree of torque to be applied. This is beneficial since the McKibben muscle does not contract very much distance. The high torque of the small moment arms is transferred to the larger moment arm, at the end of which is the paddle. There is less torque at the end of the large moment arm, but it covers much more distance, allowing for much greater speeds provided by the paddle.
References
[1] “What Is a Pneumatic Actuator and How Do They Work?” Process Industry Forum, www.processindustryforum.com/article/what-is-a-pneumatic-actuator. Accessed 15 Mar. 2024.
[2] R. H. Gaylord, “Fluid actuated motor system and stroking device,” 2844126, Jul. 22, 1958 [Online]. Available: https://patents.google.com/patent/US2844126A/en
[3] J. Midiri and K. Trieu, “BYOE: McKibben Creature: A Low-Cost Robotic Simulation of a Biological Environment,” in Experimentation and Laboratory-Oriented Studies Division (DELOS) of the 2024 ASEE Annual Conference & Exposition, ASEE 2024, Portland, OR, USA, June 23-26, 2024 [Online]