Sample Prototype
Sample Prototype
Sample Prototype
The objective of this prototype is to demonstrate a mechanism to provide torsional power to the pneumatically actuated fish autonomously, eliminating the need for manual pumping of the syringes. The ultimate aim is to achieve self-propelled movement of the fish in water by winding up the spring, enabling it to actuate and move independently.
Prototype Images

Solidworks Images
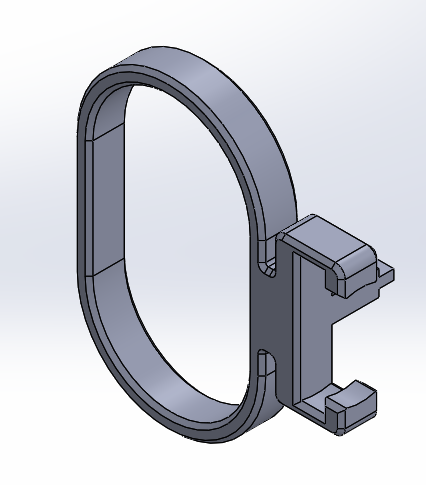
Assembly
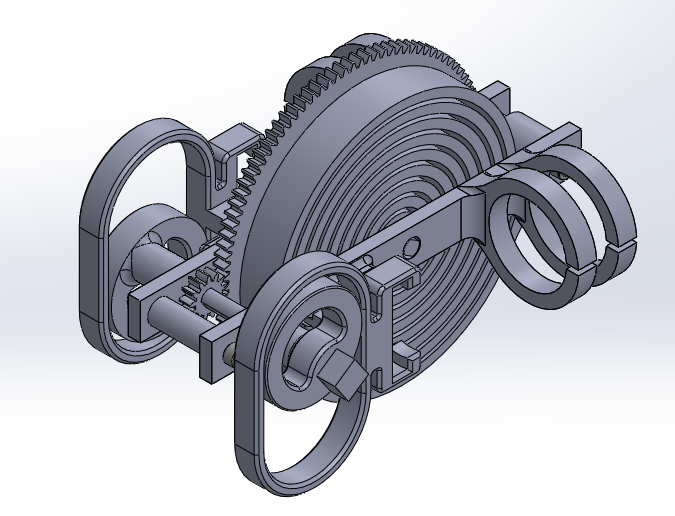
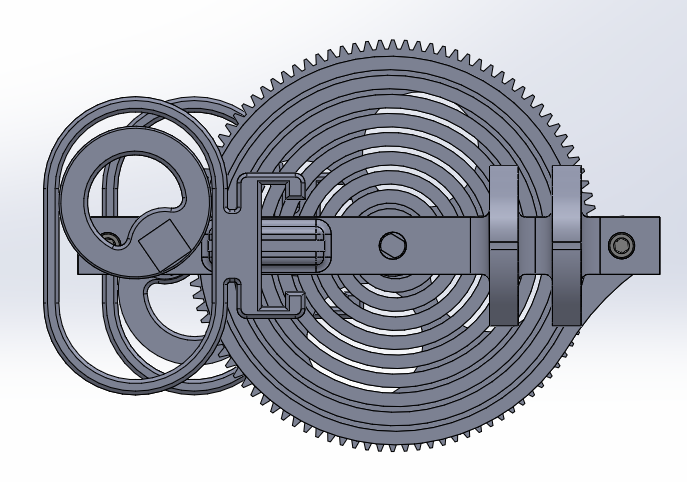
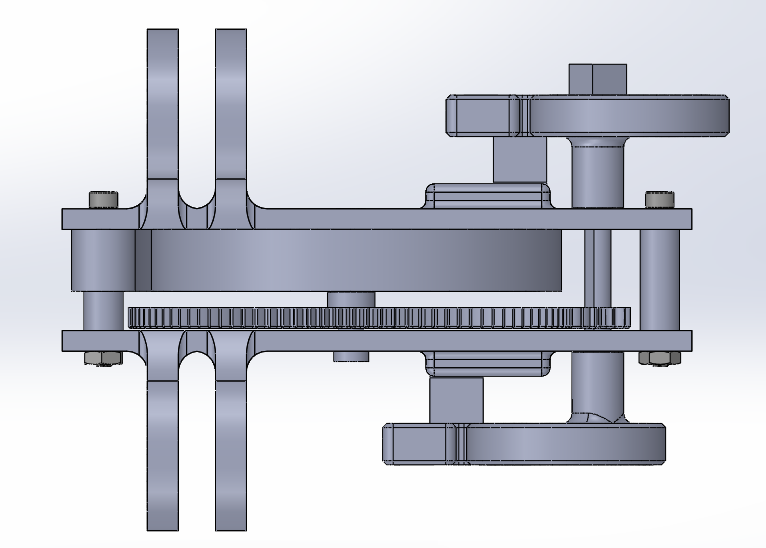
CAD model of entire final assembly from isometric, front and top view
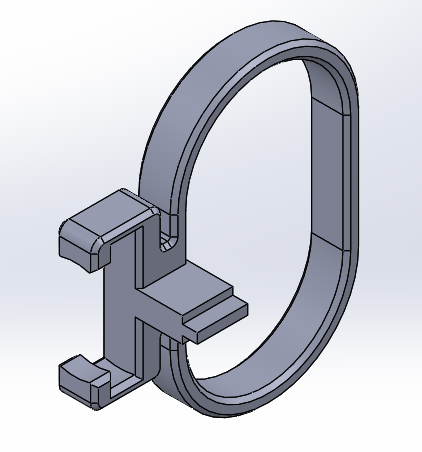
Frame
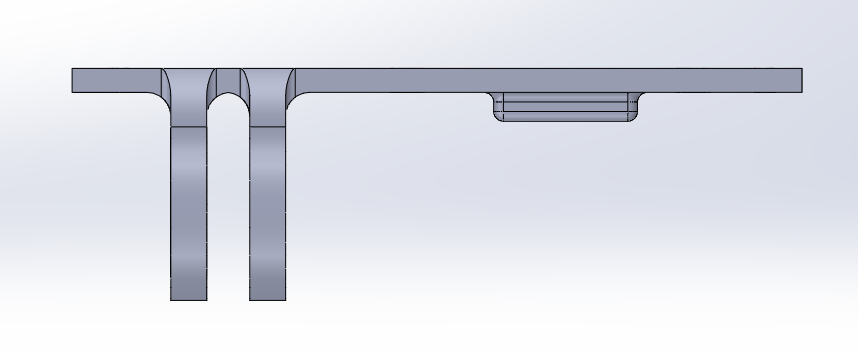
CAD model of frame part from isometric and top view
Eccentric
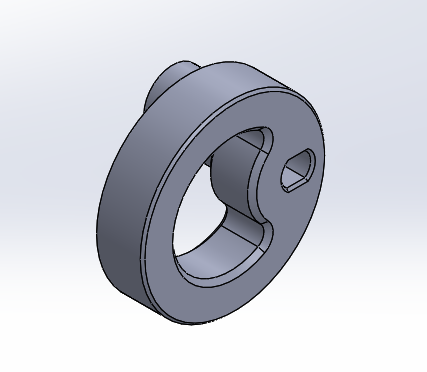
CAD model of eccentric part from isomentric and back view
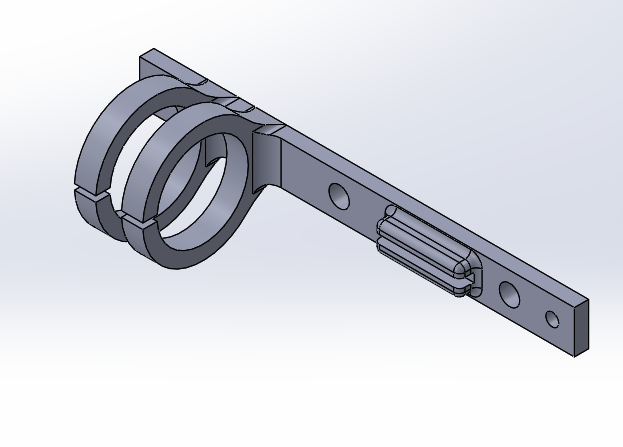
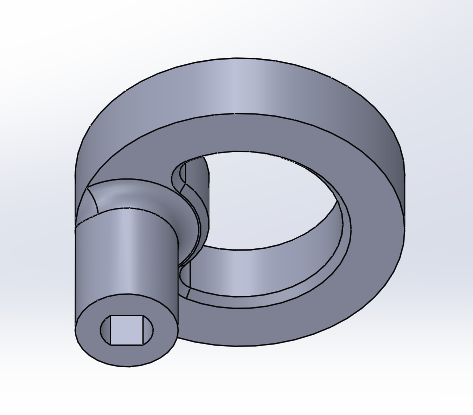
Yoke
CAD model of yoke part from isometric and back view
Spacer, Small Axle, and Large Axle
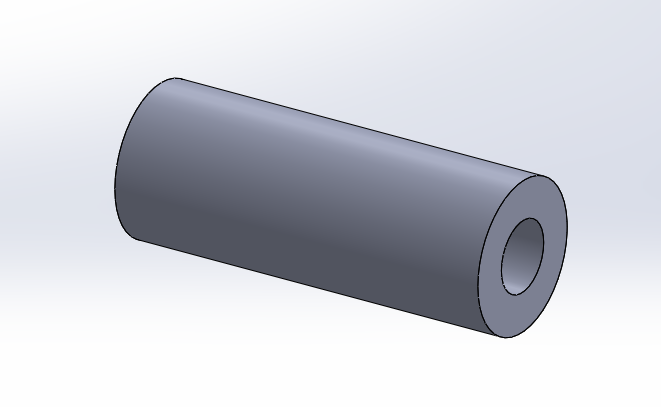
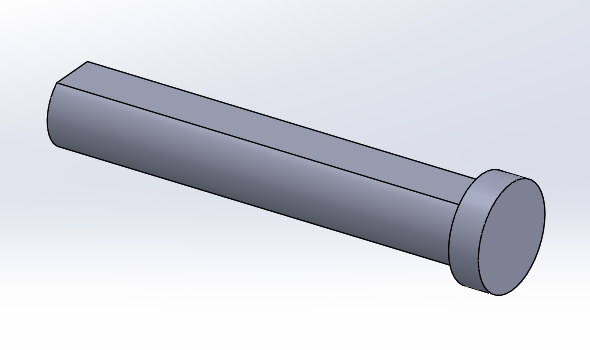
CAD model of spacer part and axle part from isometric view